


{kind=link}
Experience

Created multiple different 3D printers using different motion systems and custom software configurations.
Designed cutting edge omnidirectional robots.
Participated in 2 First Robotics teams
FTC team 9384 (2022-2024)
FRC team 333 (2021-2024)
Captain of team 9384 during the 2022-2023 season
Co-Captain of team 9384 during the 2023-2024 season
Led the CAD division of team 9384 from 2022-2024
Education
2024-Present
City Tech - New York City College of Technology
Mechanical Engineering Technology
2020-2024
John Dewey High School, Brooklyn, NY
Latest Project
Click the photo to find out more!



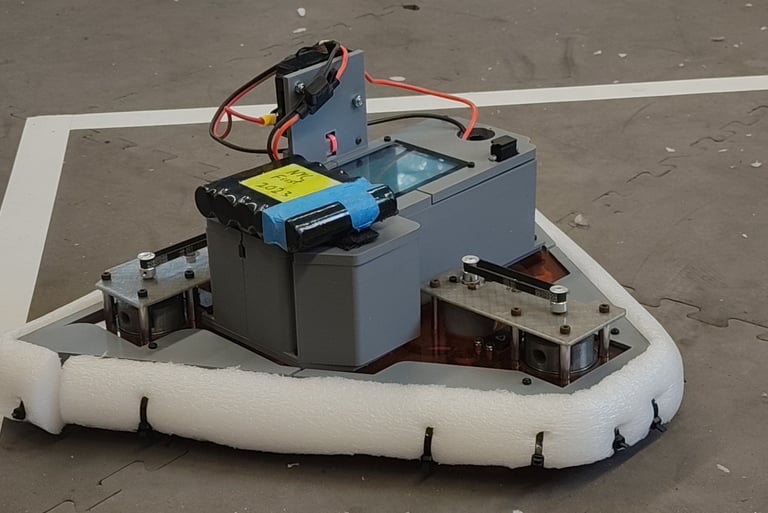
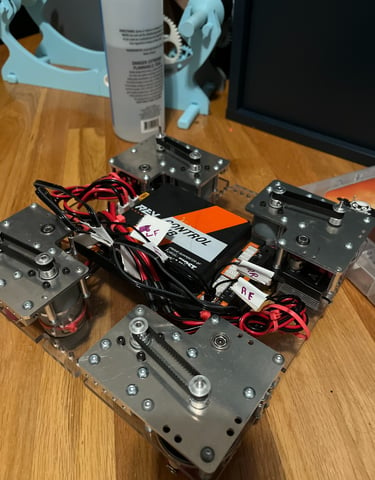
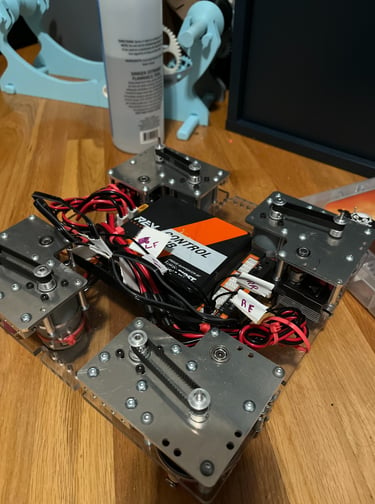
Dorito Custom Swerve Drive
I’ve always been interested in how robots move, especially systems that allow smooth and precise motion in any direction, but I noticed that most competition swerve drivetrains are expensive, power-hungry, and difficult to maintain. This pushed me to design a simpler and more accessible alternative that could still perform competitively. I created a custom Kiwi swerve drivetrain using three modules instead of four, reducing motors and steering components while preserving full omnidirectional movement, and used continuous-rotation servos with encoders to rely on software rather than costly hardware for accuracy. By building the electronics and writing the control code in Python on a Raspberry Pi, I demonstrated that thoughtful design and software control can replace mechanical complexity to create an efficient, affordable, and practical drivetrain.
My Projects
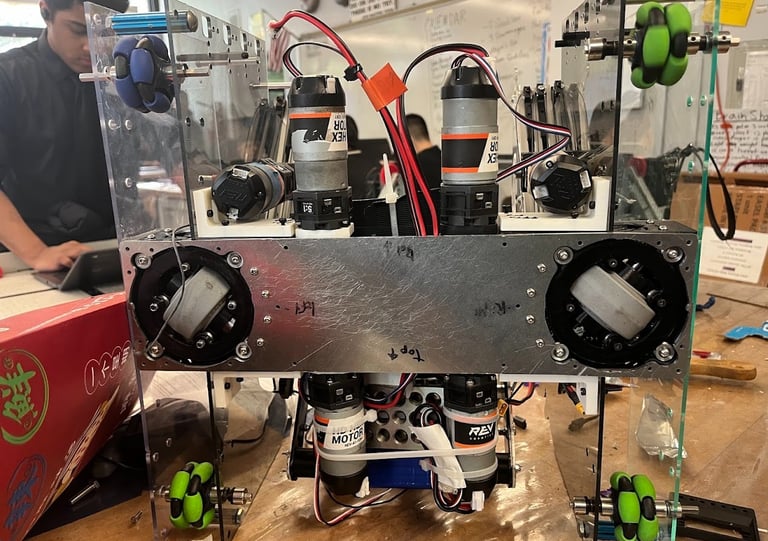
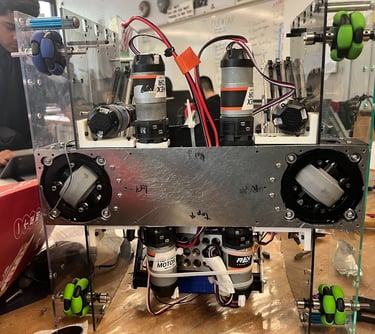
Robotics
I currently design and build advanced robotic systems that combine mechanical precision with intelligent control. My recent projects include swerve drive robots, AI powered assistants, and servo based mechanisms that use smooth motion control and voice interaction. Each build involves custom CAD design, machining, wiring, and programming allowing me to refine my engineering process from concept to completion. Before starting these independent projects, I was a dedicated member of FTC Team 9384, where I served as Team Captain (2022–2023) and Co-Captain (2023–2024). During that time, I led CAD design, managed documentation, coached at competitions, and helped organize outreach and fundraising events, laying the foundation for the robotics work I continue today.


Click the photos to find out more!
Open-source 3D Printer Designs and Code
I design and build custom low-cost FDM/FFF 3D printers, often experimenting with unique motion systems and configurations. My GitHub repository showcases a range of machines I’ve created or modified, along with the resources and files needed to replicate or modify them. Whether you're an experienced maker or just starting out, my projects are built to be accessible and versatile, offering something for anyone interested in DIY 3D printing.

Click the photos to find out more!



Computers and Programming
I started building computers at the age of 13. Since then I have built and modified over 10 PCs. I will include the builds I am most proud of along with some software projects.
Click the photo to find out more!



